Привычные нам роботы заточены под выполнение определённых задач. Но не зря же последние годы ИИ будоражит воображение всех, кто хоть немного знаком с темой. Развитие нейросетей способно привести к созданию многофункциональных роботов, которые будут учиться выполнять всё новые и новые действия. Интеллектуальный агент RoboCat учится использовать манипуляторы без участия человека.
Инженеры NUS придумали, как сделать роботизированную руку сильной и ловкой одновременно. Липкие пальцы, как у геккона, смогут безопасно поднимать даже хрупкие предметы.
28 мая Канадское космическое агентство (CSA) сообщило, что манипулятор Canadarm2 на Международной космической станции (МКС) получил небольшую пробоину в районе одного из сочленений, предположительно, от частички космического мусора.
Учёные изобрели устройство LeviPrint, которое использует интенсивные звуковые волны, чтобы создавать условия левитации для крошечных объектов и перемещать их без прямого контакта. Оно является пионером новой технологии бесконтактного производства.
Российские космонавты на Международной космической станции продолжают подготовку к выходу в открытый космос и проведут работы по интеграции европейского манипулятора ERA в состав МКС. При этом 12 июля глава Роскосмоса Дмитрий Рогозин распорядился прекратить работу с манипулятором на станции.
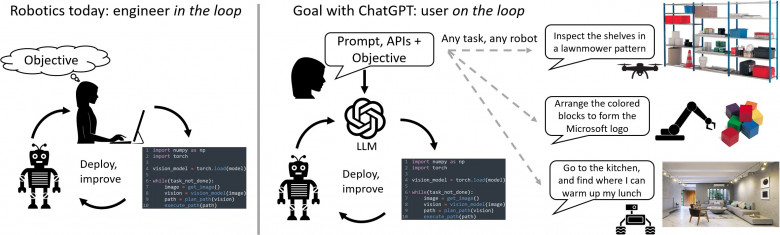
Для ChatGPT продолжают находить новое использование. Он уже и отвечал на вопросы, и сдавал экзамены, и писал дипломы, и создавал программный код. И вот инженеры Microsoft заявили, что использовали этот чат‑бот для управления роботами и коптерами. Робототехникой бот управляет с помощью команд, передающихся с помощью естественной речи.
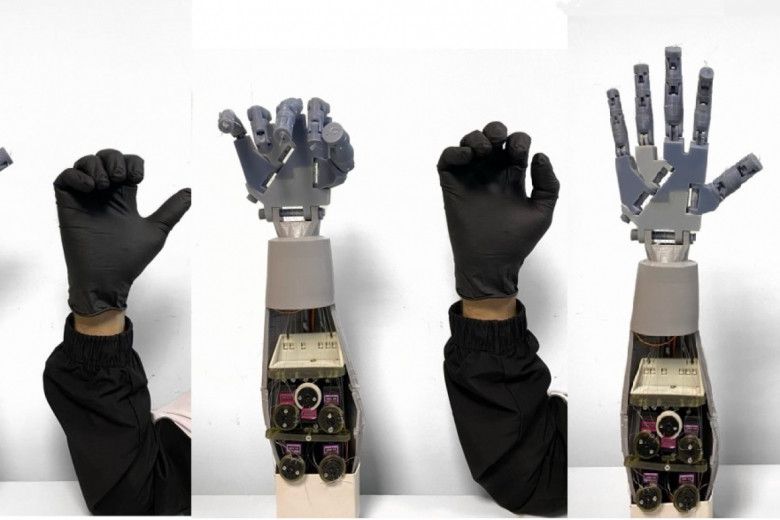
В Санкт-Петербургском государственном электротехническом университете им. В.И. Ульянова (Ленина) (СПбГЭТУ«ЛЭТИ») разработали «умную» перчатку для проведения медицинских операций. Устройство позволит оператору дистанционно управлять различными манипуляторами для медицинского назначения и не только. За счёт использования новых материалов, разработанных в СПбГЭТУ«ЛЭТИ», удалось снизить стоимость и повысить долговечность изделия в сравнении с существующими аналогами.
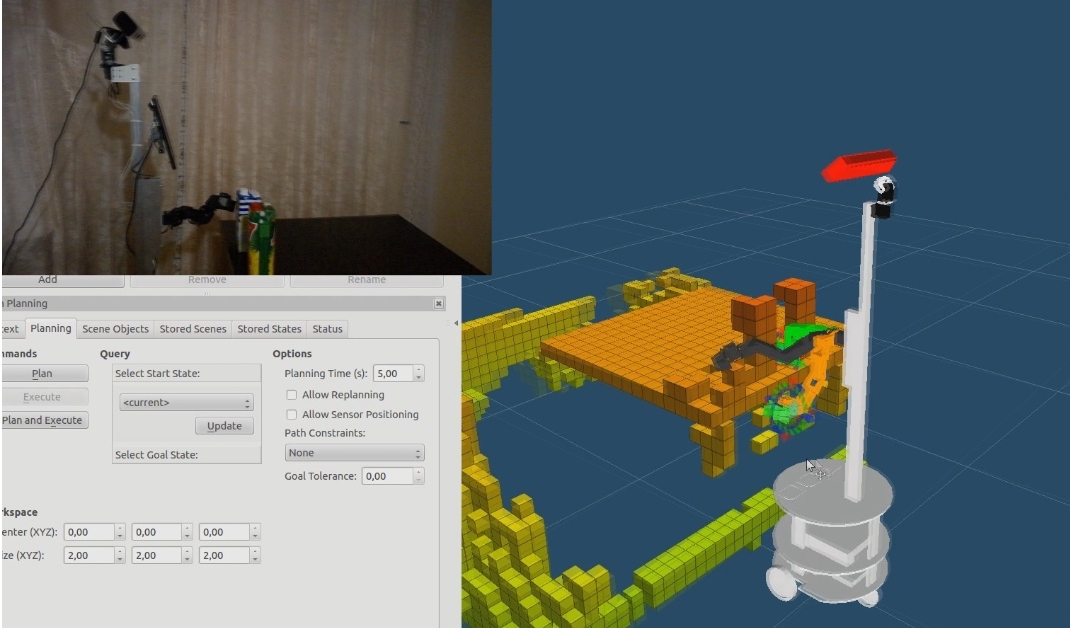
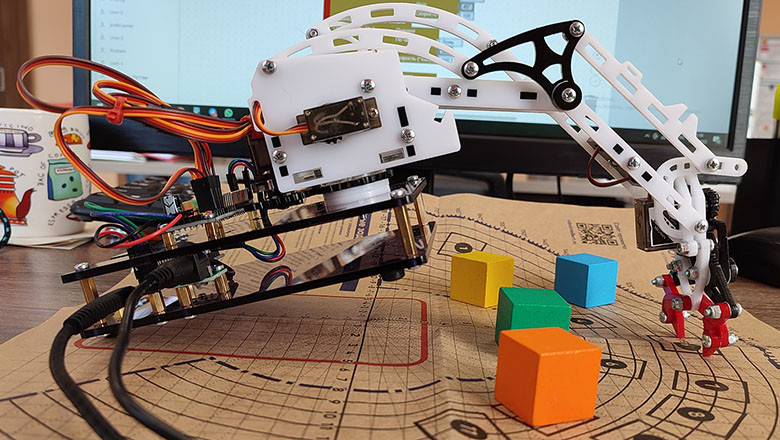
Привет Хабр! А вот и снова мы! На перекор множествам скептиков, которые нередко встречались на нашем пути, мы продолжаем развивать проект «Робот Tod Bot». Данный пост является продолжением знакомства с модулем MoveIt как инструментом управления манипулятором.
Прежде всего хочется сказать, что нам удалось достигнуть значительных результатов в задаче захвата и перемещения предметов посредством манипулятора, а также в распознавании объектов, но обо всем по порядку.
Всякий раз когда речь заходит о роботах, то люди представляют машину, умеющую делать что-то полезное в нашем материальном мире, а не только вести диалоги и перемещаться. Благодаря развитию нынешних технологий стало гораздо легче использовать манипуляторы в собственных проектах. В данной статье речь пойдет о таком замечательном ПО для управления манипулятором как MoveIt и некотором функционале, реализованном на его базе в нашем проекте сервисного робота Tod.
Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
Сейчас моя робо-рука выглядит так:
Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Как-то раз, во время обучения на втором курсе университета, передо мной была поставлена задача: стряпать что-нибудь «этакое», дабы подтвердить высокое звание «будущего инженера-робототехника». На этой пафосной ноте я отправился в глубины сознания для поиска идей. После непродолжительного путешествия появилась мысль об устройстве, теорией создания которого хочу поделиться с общественностью.
Суть разработки такая. Рассмотрим обычный, скажем, 5-ти осевой манипулятор (кинематическая структурная схема изображена на рисунке ниже). Его возможности при перемещении в пространстве широки: он способен совершать движения в 5-ти координатах, причём одновременно, т.е. 3 координаты по трём осям XYZ и вращение вокруг двух из них. В таком случае рабочий элемент манипулятора способен занять любое положение в рабочем пространстве и вместе с этим сохранить требуемую ориентацию рабочего органа (не считая поворот рабочего элемента вокруг собственной оси).
Не успели еще все желающие купить/собрать (нужное подчернуть) себе домашний настольный 3D-принтер как для гиков придумали очередную голубую мечту. Сразу несколько кампании по сбору средств на настольный робот-манипулятор для DIY, мелкого производства и детского творчества( странный набор возможных применений по замыслу авторов, не находите?) заставили меня задумать о необходимости подобного прибора в хозяйстве. После краткого обзора проектов спешу представить Вам свои выводы.
Начну с проекта Dobot, который собрал $506,351. Этот проект уже завершен, а сам робот уже мельком светился на GT в посте о MakerFaire 2016.
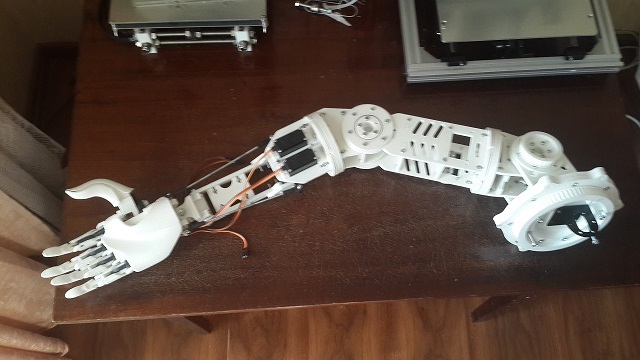
Сегодня мы хотим рассказать об устройстве манипулятора промо-робота Oscar. Хотя изначально к манипулятору не были предъявлены жесткие индустриальные требования, тем не менее нашей целью было сделать практичное и эстетичное решение, при этом не очень дорогое и относительно несложное в изготовлении в домашних условиях.
Длина манипулятора от плеча до кончиков пальцев составляет 0.6 метров, вес — 2.25 кг. Материалы изготовления — PLA. Манипулятор условно можно разделить на 3 компонента:
Бионическая кисть
Запястье (2 степени свободы)
Локтевой и плечевой суставы (5 степеней свободы)
Связано это с тем, что каждый из компонентов имеет свое техническое решение.
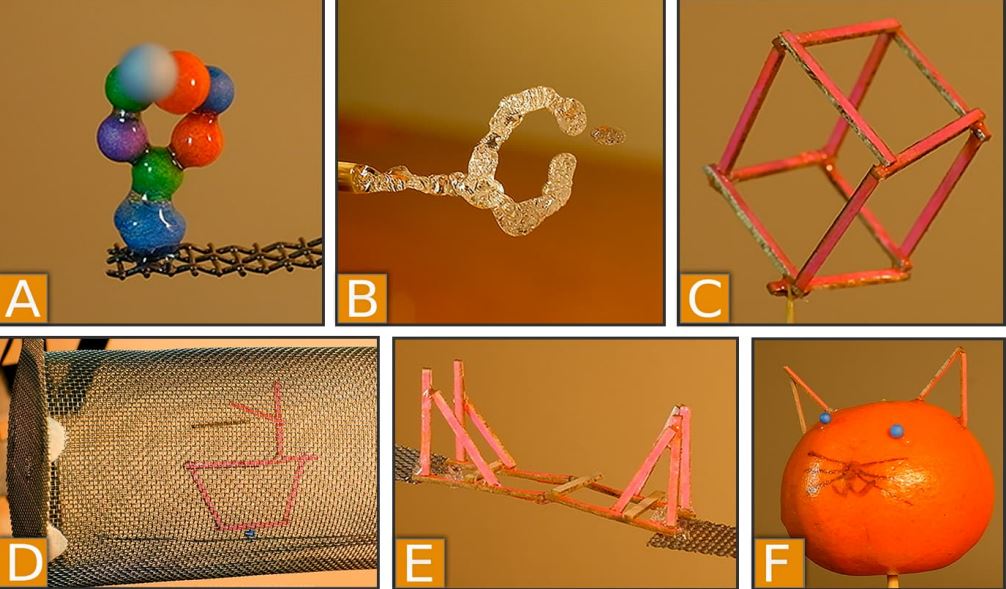
Чтобы сделать захват роботов более надёжным, исследователи разрабатывают максимально сложные для манипулирования объекты
Вдохновившись концепцией состязательных изображений, исследователи из Калифорнийского университета в Беркли изучают физические состязательные объекты, тщательно разработанные так, чтобы их было сложно захватывать стандартными роботизированными захватами
В последнее время появилось огромное количество исследований по теме «состязательных изображений», представляющих собой изображения объектов, изменённые таким образом, чтобы алгоритмам компьютерного зрения их было особенно сложно распознавать. Идея в том, чтобы использовать эти изображения для разработки более надёжных алгоритмов компьютерного зрения, поскольку их «состязательная» природа представляет собой специально реализованный «наихудший» вариант – и если уж ваш алгоритм сможет справиться с состязательными изображениями, то он, вероятно, справится с большинством других заданий.
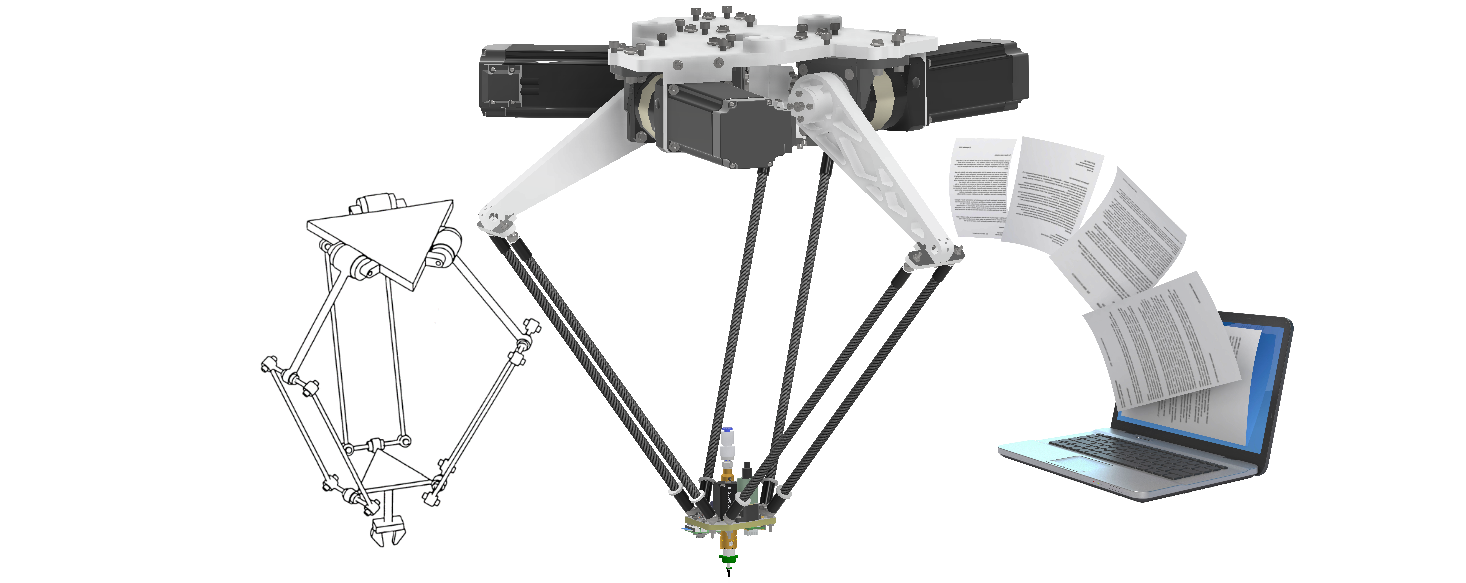
Этой публикацией я начинаю цикл статей о дельта-роботе. Здесь поговорим об истории этого механизма и я расскажу немного об интересных работах по этой тематике. В следующих статьях будут материалы, посвящённые его теоретическому анализу, построению рабочей зоны, выбору приводов, конструированию, изготовлению, сборке и созданию системы управления.
Это вторая статья из цикла моих работ, посвящённых параллельным механизмам, а именно дельта-роботу. В прошлой статье ознакомились с конструкцией этого манипулятора, изучили историю по материалам других авторов и узнали о научных работах, которые велись и ведутся в рамках проектирования, усовершенствования и использования этого механизма. Сегодня начнём изучать дельта-робот более обстоятельно. Убедимся, что рабочий орган этого механизма имеет три степени свободы. Узнаем, что такое прямая и обратная задачи кинематики, решим их, решение проверим. Также расскажу, как я рисую "красивые" картинки и дам готовый код и 3Д модель для расчётов.
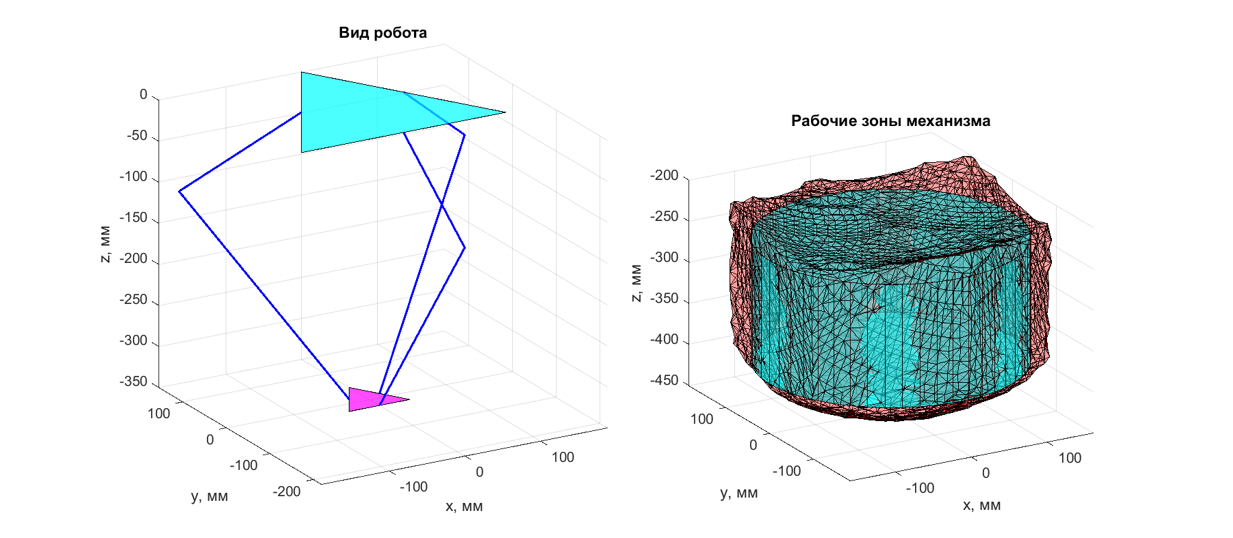
В прошлых статьях мы познакомились с механизмом, узнали его историю, решили, пожалуй, главную для дельта-робота задачу – задачу о положениях, но так и не получили никаких данных, необходимых для проектирования этого манипулятора. Сегодня, используя ранее полученные зависимости, мы начнём это делать. Построим рабочую зону этого механизма, порассуждаем о том, что влияет на её размер и форму, а также обсудим вопрос выбора длин звеньев робота.
Цель написания данной статьи — показать, как на реальном оборудовании реализовывать системы сканирования объектов и создавать их трехмерные модели выносным сканером профильного типа.
Существует несколько различных подходов к сканированию, но мы рассмотрим только облака точек. Набор точек, полученных в результате сканирования, описывает поверхность сканируемого объекта, которая легко поддается обработке (фильтрация, удаление выбросов, т. д.). Однако при использовании выносных сканеров, как правило, возникают проблемы искажения получаемых моделей в связи с движением сканера над поверхностью исследуемого объекта. Решение данной проблемы мы и рассмотрим в рамках этой статьи.
Работая программистом и будучи отцом двух мальчиков неминуемо задумываешься над тем, как будут твои дети жить в технологическом мире и как будут им пользоваться. И, как любой айтишник, я конечно же хочу, чтобы дети чувствовали себя уверенно. А ещё лучше, чтобы стали профессионалами. Современные технологии дают огромный простор для самоопределения, и моя задача - рассказать как можно больше и как можно интереснее. Там уж сами решат, чего им хочется.
Сегодня расскажу о том, как я учил детей программировать робота, а заодно учился и сам.
Туториал где мы: познакомимся чуть ближе с роботами компании ABB, узнаем что такое FlexPendant и IRC5. Создадим своего робота в RobotStudio и с помощью пульта управления создадим для него простую программу с координатными точками.