Введение
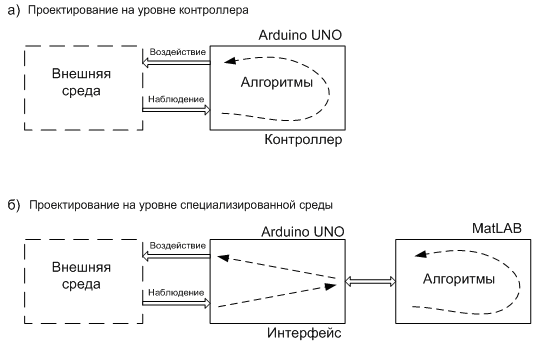
Понимание, каким образом программная переменная принимает значение физического сигнала и как значение программной величины превращается в конкретный сигнал, может помочь разработчикам программного обеспечения систем управления при расчете задержек, решении задач оптимизации, обеспечении устойчивости, разработке интерфейсов и подключении к процессорам и контроллерам периферии: датчиков, исполнительных механизмов, и др.
В этой работе рассматриваются вопросы, связанные с прямым и обратным преобразованием “программная переменная – сигнал”: особенности построения каналов передачи данных, подключения периферии к шинам процессора, вопросы адресной приёма-передачи данных и работа гипотетического процессора при обмене данными с внешним устройством.
Формирование канала передачи данных
Рассмотрим канал передачи данных, который имеет всего два состояния, например, наличие или отсутствие напряжения. Передатчик должен устанавливать напряжении в линии в соответствии с передаваемыми данными, а приемник по измеряемому напряжению выделять данные линии. Простейший передатчик включает источник напряжения и идеальный ключ, который изменением собственного сопротивления (ноль или бесконечность) замыкает или размыкает провода. В качестве идеального приемника используется измеритель напряжения (мультиметр) с бесконечным входным сопротивлением.
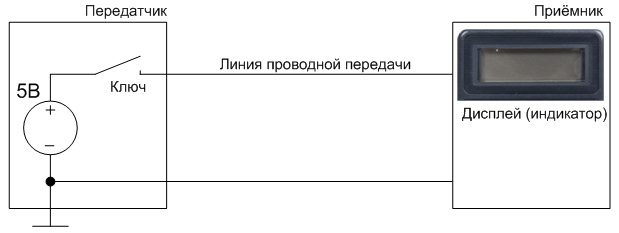 Рис. 1.
Рис. 1. Схема с неопределенным напряжением в линии передачи. В реальной схеме функцию ключа может выполнять транзистор.
В схеме Рис. 1 при замыкании ключа приёмнику передается 5В источника, однако, когда ключ разомкнут на входе приемника находится неопределенное напряжение.
Этой неопределенности нет в схеме Рис. 2, которая имеет два устойчивых состояния 5В или 0В. Сопротивление R добавлено в схему передатчика для ограничения тока через замкнутый ключ. Переходный процесс в линии пропорционален произведению ёмкости линии на выходное сопротивление передатчика, которое отличается при установлении и сбросе напряжения в линии. При установке напряжения в линии происходит заряд ёмкости через сопротивление R. Во время сброса напряжения ёмкость разряжается через сопротивление замкнутого ключа.
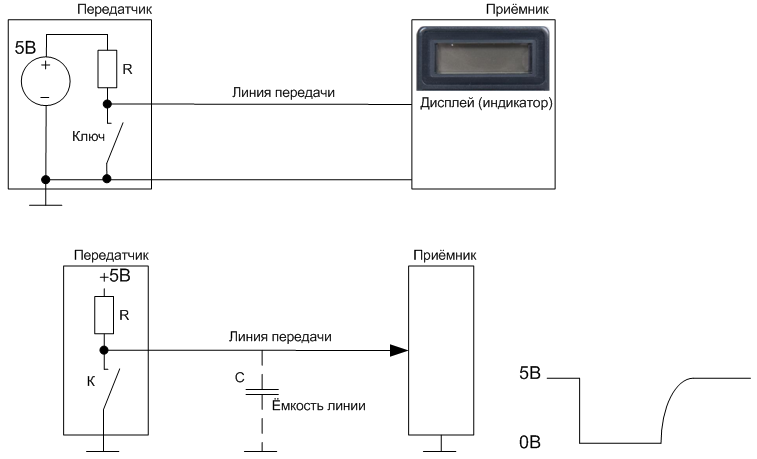 Рис. 2.
Рис. 2. Передача двух состояний 5В и 0В. Тождественные схемы. Постоянная времени (R*C) перехода из 0В в 5В (заряда емкости) больше постоянной разряда линии через идеальный ключ с нулевым сопротивлением.

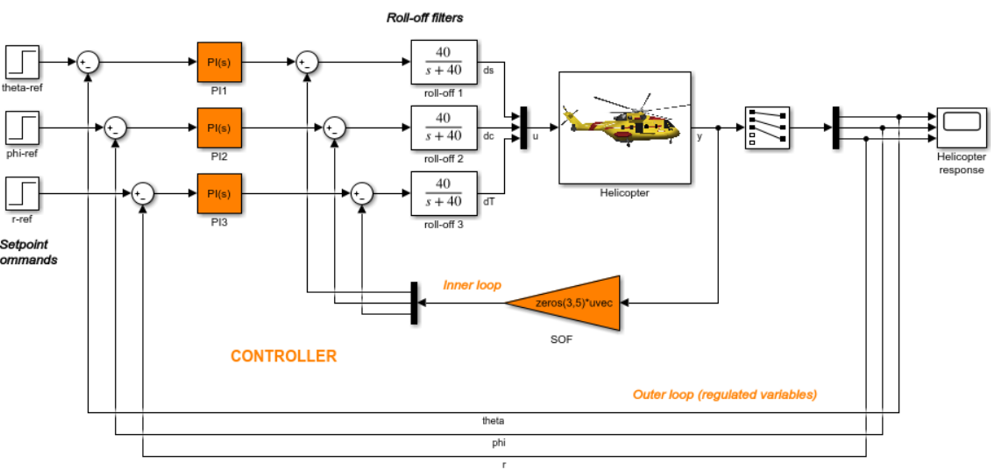
 . В этой работе рассматриваются особенности этого настройщика на примере построения двухконтурной системы управления.
. В этой работе рассматриваются особенности этого настройщика на примере построения двухконтурной системы управления.